|
|
LA NOSTRA COLLABORATRICE REDAZIONALE BEATRICE GUARDATI, CI INVIA UN ARTICOLO IN CUI CI SPIEGA SOMMARIAMENTE E IN MANIERA COMPRENSIBILE A TUTTI, LA SCIENZA DELLA BIOMECCANICA IN FORMA GENERALE. NELLA SPERANZA CHE LA SUA PRIMORDIALE COMPRENSIONE POSSA STIMOLARE GLI ISTRUTTORI PIU’ ATTENTI ED INTRAPRENDENTI, VERSO UN SUO PIU’ AMPIO APPROFONDIMENTO SU TESTI SPECIFICI.Primi elementi di BIOMECCANICADi: Beatrice Guardati
|
|
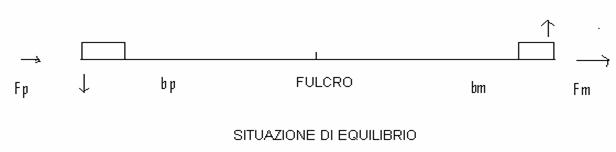
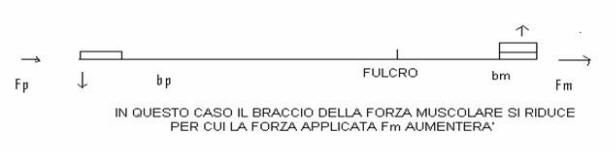
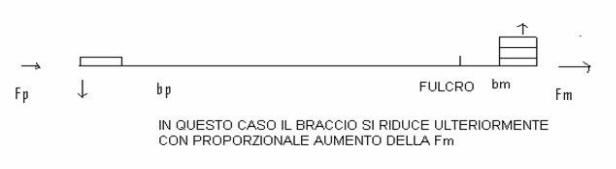
leva di 1°genere Nelle leve di primo genere il fulcro si trova tra i due punti di applicazione . E’ una leva svantaggiosa e sollecita un notevole impiego muscolare ma con piccole escursioni a grandi velocità. Un esempio di leva di 1° genere è mantenere il capo eretto o effettuare uno squat. L’immagine è stata tratta da: http://www.personalweb.unito.it/caterina.guiot/Didattica/FisicaMeccanica/Leve.html |
 |
|
leva di 2° genere La leva di di 2° genere trova il suo pb tra il fulcro e il punto di applicazione della fm, di conseguenza si può dedurre che la leva è vantaggiosa, dato che il braccio muscolare è più lungo del braccio della forza peso. Un esempio di leva di secondo genere è sollevarsi sugli avampiedi. L’immagine è stata tratta da: http://www.personalweb.unito.it/caterina.guiot/Didattica/FisicaMeccanica/Leve.html |
 |
|
leva di 3° genere La leva di terzo genere è una leva svantaggiosa in quanto il punto di applicazione della fm si trova tra il fulcro e la fp, di conseguenza il braccio bm è sempre inferiore al braccio bp. Un esempio di leva di 3° genere è la flessione del braccio sull’avambraccio, cioè il movimento che facciamo quando vogliamo contrarre il bicipite. L’immagine è stata tratta da: http://angelomerlino.blogspot.com/ |
 |
Fino a ora abbiamo parlato di baricentro (ovvero quel punto immateriale che cambia la sua posizione secondo il movimento che si effettua , ma ancora non abbiamo detto come si trova).
La posizione del baricentro è ancora motivo di studio, le varie ricerche fatte sino ad ora hanno permesso moltissimi successi a livello sportivo. Un esempio lo possiamo trovare nel salto in alto, infatti da quando è stato capito che il baricentro si trovava al di sotto dell’asticella il dispendio di energia è stato ridotto, inoltre si è avuto un miglioramento notevole del gesto tecnico.
Mentre nei solidi omogenei è molto più semplice trovare la posizione del baricentro, infatti esso lo troviamo nel centro geometrico, nel corpo umano, essendo composto da solidi, liquidi e materiale gassoso, risulta essere molto più complesso.
I metodi per calcolarlo sono ancora numerosi dato che ancora è motivo di studio, uno tra i tanti è il metodo Gubitz che pur essendomi documentata non sono riuscita a trovarne la spiegazione, naturalmente sarà mia premura trovarlo al più presto.
Fischer e Bernstein adottarono un altro metodo, attraverso esami autoptici, pesarono ogni singolo segmento del corpo umano riuscendo a posizionare ogni singolo baricentro e arrivando alla conclusione che tutti si trovavano negli assi longitudinali del segmento osseo e che la distanza del baricentro dall’articolazione prossimale, è in rapporto fisso con la lunghezza totale.
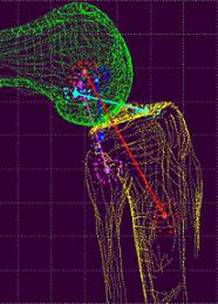
Andando nello specifico, per esempio citando un esercizio che in sala pesi è molto comune, lo squat, per calcolare il baricentro, in posizione statica e cioè in una condizione di equilibrio che si verifica nel preciso istante dell’esecuzione, ovvero partenza e arrivo, passaggio dalla fase gravitazionale a quella antigravitazionale e alla metà circa di ognuna di queste due fasi, sono stati calcolati gli angoli dei segmenti anatomici in modo goniometrico. In seguito sono state ricavate tutte le posizioni di ogni elemento quale, atleta, bilancere, e atleta-bilancere e chiaramente sono state ben evidenziate tutte le forze peso che gravavano sui complessi articolari.
Dopo ciò… è stato fatto un sistema di assi cartesiani arbitrario, associando ad ogni baricentro una coppia di coordinate x, y, che indica la posizione del riferimento scelto. Conoscendo le coordinate dei vari baricentri… ovvero di piedi, gambe, cosce indicati con I, di tronco avambracci, braccia, testa, indicati con S e conoscendo il peso di ogni singolo segmento corporeo è possibile calcolare le coordinate Xi e Yi del baricentro della parte inferiore del corpo. Con lo stesso metodo sono state ricavate le coordinate Xs e Ys della parte superiore del corpo.
Sapendo le coordinate I e S è possibile arrivare a calcolare U; ovvero il baricentro del corpo senza carico esterno. Se consideriamo U 2/3 del peso corporeo, è possibile determinare la posizione del baricentro T, ovvero baricentro totale che comprende il corpo E più il carico esterno. (vedi figura sotto)
(Foto scannerizzata da Biomeccanica degli esercizi fisici, Alfredo Stecchi)
Tutto questo serve a capire quanti interventi muscolari servono perché il corpo non cada ne avanti, né indietro e quindi che il corpo in quella precisa posizione ha il compito e la necessità di far cadere il baricentro esattamente all’interno del piano d’appoggio al suolo. Il poligono che si forma unendo i punti di contatto con il corpo al suolo fa capire che tanto più è ampia la base tanto più equilibrio e stabilità c’è.
(Foto scannerizzata da Biomeccanica degli esercizi fisici, Alfredo Stecchi)
Parlando della biomeccanica abbiamo visto che ci sono diverse materie che studiano ognuna una cosa specifica quali la cinematica, la statica ecc. Un’altra è la dinamica, che studia il movimento considerando le forze che lo causano.

La dinamica si basa su tre principi che è necessario conoscere per addentrarci nella materia. I tre principi sono quelli di tre grandi scienziati quali Leonardo Da Vinci, Galileo Galilei e Isacco Newton.
1° principio
Il primo principio è stato intuito principalmente da Leonardo Da Vinci e formulato in seguito da Galileo Galilei.
“Corpus omne perseverare in statu suo quiescendi vel movendi uniformiter in directum, nisi quatenus a viribus impressis cogitur statum illum mutare”
Ovvero: ciascun corpo persevera nel suo stato di quiete o di moto rettilineo uniforme, a meno che sia costretto a mutare tale stato da forze impresse (esterne).
(citazioni prese da: //it.wikipedia.org/wiki/).
2° principio
Mutationem motus proportionalem esse vi motrici impressae, et fieri secundum lineam rectam qua vis illa imprimitur (cit.),
Ovvero: un punto materiale (cioè un corpo di dimensioni trascurabili rispetto al sistema di riferimento in esame e contemporaneamente dotato di massa) al quale sia applicata una forza, varia la quantità di moto in misura proporzionale alla forza, e lungo la direzione della stessa.
Praticamente il rapporto tra la forza applicata e l’accelerazione ottenuta F/a è costante, ma vista la differenza tra peso e massa, questo rapporto indica la massa per cui la formula sarà:
F=m x a
Visto poi che su una massa m agisce in modo costante l’accelerazione di gravita’ g il principio può essere formulato così:
P(forza peso)= m (massa) x g (accelerazione di gravità)
Da Newton l’accelerazione di gravità è stata calcolata con un valore fisso pari a 9,81 e arrotondata a 10 per semplicità di calcolo, così la forza di gravità che agisce su un corpo, sarà pari a m x 9,81.
Facendo un esempio pratico se la m è uguale a 5 Kg la forza di gravità che agisce su questo corpo sara’: 5 x 9,81= 49,05
3° principio
Actioni contrariam semper et aeqalem esse reactionem: sive corporum duorum actiones in se mutuo semper esse æqualis et in partes contrarias dirigi. (cit.)
Ovvero: ad ogni azione corrisponde sempre una reazione uguale e contraria, agente sulla stessa retta. Quindi le mutue azioni fra due corpi, sono sempre uguali e dirette in senso contrario.
Più precisamente: quando un corpo A esercita una forza su un corpo B, anche B esercita una forza su A; le due forze hanno stesso modulo (intensità), stessa direzione, ma versi opposti.
Come abbiamo visto prima la formula F=m x a; dedotta dal secondo principio della dinamica, dimostra che il prodotto m x a è una forza uguale e contraria a F infatti:
F – m x a= 0
Questa forza è chiamata forza d’inerzia (principio di D’Alambert), ovvero sta ad indicare che in qualsiasi momento, durante il movimento, questa forza si trova perfettamente in equilibrio con la forza motrice.
Detto questo, andiamo ora a definire cos’è il lavoro in fisica: il lavoro è indicato come il prodotto della forza per lo spostamento ovvero L= F x S. Se invece andiamo a descrivere il lavoro in biomeccanica possiamo dire che esso può verificarsi anche in assenza di uno spostamento, un esempio semplice è il lavoro svolto in sala pesi semplicemente sorreggendo un peso in modo del tutto statico, infatti è inteso lavoro qualsiasi dispendio energetico sia esso statico che dinamico.
Un’altra grandezza fisica fondamentale è la potenza, cioè un lavoro svolto in un’unità di tempo e durante gli allenamenti per la forza, può essere assimilato all’intensità.
P= L/t
Se consideriamo inoltre che V=s/t (velocità= spazio /tempo), attraverso alcuni passaggi possiamo giungere alla conclusione che la P è data dal prodotto della forza/velocità.
L= F x s
P= L/t
P= F x (s/t)=v
P= F x v
Il seguente calcolo è importante al fine di eseguire un ottimo allenamento sia per i professionisti che per i dilettanti o amatori. Uno strumento, il dinamometro isotonico, inventato per il calcolo della potenza è quello di Bosco chiamato da lui stesso Ergopower. Con questo strumento è possibile calcolare i giusti carichi, la giusta velocità e non commettere errori e dispendi energetici inutili.

Per i rilevamenti biomeccanici ci sono diversi metodi.
VALUTAZIONE SOGGETTIVA: Uno dei vari metodi è l’analisi immediata dell’allenatore, infatti quest’ultimo può fare un bilancio visivo, tramite la sua esperienza e la preparazione tecnica e professionale da lui posseduta. Questa sarà una valutazione soggettiva.
VALUTAZIONE SCIENTIFICA: Per quanto riguarda invece una valutazione scientifica, l’allenatore deve affidarsi obbligatoriamente alla biomeccanica.
I mezzi esistenti sono quelli forniti da Pozzo, Sacripanti, Zanetti (1997):
la fotografia: attraverso macchine fotografiche che permettono di valutare il movimento in un preciso istante.
Cinematografia: una o più postazioni con le quali si riesce a visualizzare il movimento in tutte le sue fasi e tracciando le traiettorie di qualunque punto si voglia considerare.
Dinamometria: dinamometri fissi, pedane dinamometriche e solette di rilevazione pressoria, che misurano la forza espressa.
Tachimetria: tachimetri, pantografi e rilevatori analogici, che misurano la velocità delle parti del corpo e di attrezzi eventualmente utilizzati nel movimento.
Accelerometria: con accelerometri vengono registrate le diverse accelerazioni.
Goniometria: attraverso goniometri manuali, elettronici e ottici, vengono misurate le variazioni angolari.
Elettromiografia: viene rilevata l’attività elettrica di attivazione dei singoli muscoli o gruppi muscolari.


Naturalmente tutti questi singoli metodi sono stati combinati tra loro formando delle attrezzature molto sofisticate, che misurano contemporaneamente diversi parametri.
Una tra le più famose attrezzature è il Muscle Lab System di Bosco, preceduto dall’Ergopawer sopra citato, capace di misurare rilevare ed amplificare i processi biologici che si verificano nel muscolo durante la contrazione statica e dinamica. E’ composto da un processore, un software per Pc e vari sensori, strumenti di misura.
Con esso è possibile misurare:
forza, velocità potenza durante il lavoro muscolare dinamico
resistenza muscolare, fatica
forza isometrica
EMG sincronizzata con il lavoro muscolare realizzato
variazione e velocità angolare
prestazione di salto o test di Bosco
analisi biomeccanica delle prestazioni di sprint
analisi biomeccanica della corsa in pista o su tappeto scorrevole.
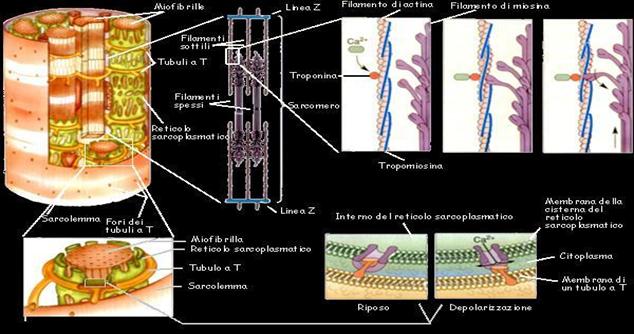
Abbiamo detto che per dare ad un movimento serve uno stimolo nervoso, all’avvio di questo le fibre muscolari vengono reclutate e inizia il suo lavoro.
A questo punto la tensione prodotta arriva anche alle ossa e ai tendini dando vita così al movimento.
Ci sono vari tipi di contrazione:
Contrazione statica o isometrica: non si verifica nessuno spostamento e si sviluppa la massima tensione.
Contrazione dinamica o isotonica: si sviluppa tensione e si avviene uno spostamento dei punti di origine e inserzione muscolare
Contrazione concentrica: la resistenza imposta viene superata e il muscolo si accorcia.
Contrazione eccentrica: non viene superata la resistenza imposta e il muscolo si allunga sviluppando tensione.
Contrazione pliometrica: avviene sommando la contrazione concentrica ed accentrica, praticamente il muscolo va incontro ad un accorciamento preceduto da un prestiramento muscolare.
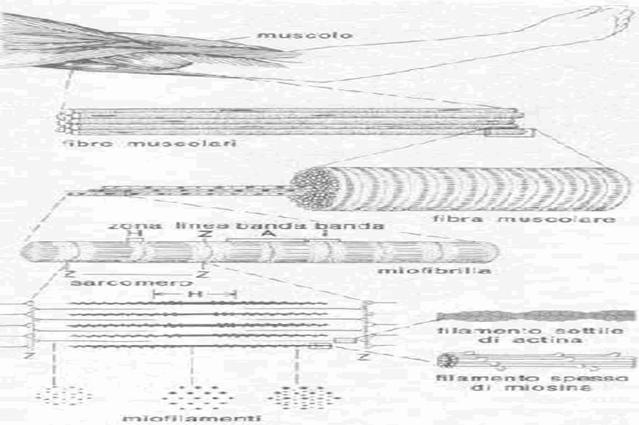
Così come ci sono diversi tipi di contrazione, anche le fibre vengono divise in tre tipi.
Secondo Edigton e Edgerton sono divisibili in fibre lente (ST), fibre veloci (FTb), fibre intermedie (FTa).
Fibre lente: brevi tensioni per lunghi periodi, elevata capacità di resistere alla fatica.
Fibre veloci: alte tensioni in breve tempo e affaticamento precoce.
Fibre intermedie: fibre che hanno caratteristiche appunto intermedie tra le due precedenti.

Negli arti ci sono alte quantità di fibre veloci, infatti questi determinano movimenti rapidi, mentre, il tronco e i muscoli posturali hanno un elevata quantità di fibre lente.
La biomeccanica, oltre a studiare tutto quello fin’ora detto, studia inoltre la coordinazione intermuscolare.
Molto spesso, in modo ignorante si considera movimento solo l’attivazione dei muscoli direttamente coinvolti, non calcolando quanti altri muscoli aiutano e contribuiscono a fare quel determinato movimento.
L’azione che tutti quei muscoli svolgono collaborando per un determinato movimento, prende il nome di sinergismo o forza d’insieme. Ogni collaborazione ha un ruolo diverso e viene quindi fatta una divisione in base ai muscoli coinvolti, ai gruppi muscolari e alla loro funzione.
Muscoli agonisti: spostano i segmenti ossei aumentando la propria tensione.
Muscoli antagonisti: sono quei muscoli opposti ai muscoli agonisti, collaborano frenando il movimento provocato dal muscolo agonista, in modo tale da salvaguardare l’articolazione presa in causa.
Muscoli fissatori: fanno in modo che il segmento osseo sia fissato durante l’azione dei muscoli agonisti.
Un esempio possono essere i muscoli che muovono l’omero, infatti questi hanno la loro inserzione sulla scapola che è mobile, il fissaggio è provocato dalla contrazione che avvicina la scapola alla colonna vertebrale, è così che si sviluppa il movimento.
Muscoli neutralizzatori: questi muscoli contribuiscono a non far eseguire movimenti inutili con direzioni sbagliate e escursioni troppo ampie.
Naturalmente con questo sommario e generale mio articolo, non ho certo la presunzione di spiegare la biomeccanica, ma semplicemente di scatenare solo un po’ di curiosità verso una scienza che pur essendo molto complessa è anche divertente, ma soprattutto molto importante e preziosissima, ai fini di cercare di comprendere in modo totale il movimento e quindi il miglior modo per eseguirlo… non ultimo un modo comprensibile a tutti per aumentare le proprie conoscenze e preparazione professionale, tale da dare basi solide a chiunque per poter meglio comprendere la lettura raccomandata di testi specifici.